
 Hoje saímos do hotel às 8:45. Por volta das 9:00 chegamos ao centro da esa. Depois do habitual procedimento de segurança lá nos deram o cartão que da acesso ao centro. Começamos o dia com uma visita guiada ao centro. A primeira paragem é a estação de controlo dos satélites PROBA1, PROBA2 e PROBAV. Trata-se de um conjunto de satélites autônomos (PROBA – Project for On-Board Autonomy) que recolhem vários tipos de dados que são posteriormente tratados por várias organizações. O primeiro foi lançado em 2001 e tem o formato de uma máquina de lavar roupa mais pequeno que um metro cúbico. É o primeiro satélite 100% belga que tem como missão captar imagens de alta resolução de vários ângulos e infra-vermelhos do planeta terra.
Hoje saímos do hotel às 8:45. Por volta das 9:00 chegamos ao centro da esa. Depois do habitual procedimento de segurança lá nos deram o cartão que da acesso ao centro. Começamos o dia com uma visita guiada ao centro. A primeira paragem é a estação de controlo dos satélites PROBA1, PROBA2 e PROBAV. Trata-se de um conjunto de satélites autônomos (PROBA – Project for On-Board Autonomy) que recolhem vários tipos de dados que são posteriormente tratados por várias organizações. O primeiro foi lançado em 2001 e tem o formato de uma máquina de lavar roupa mais pequeno que um metro cúbico. É o primeiro satélite 100% belga que tem como missão captar imagens de alta resolução de vários ângulos e infra-vermelhos do planeta terra. 
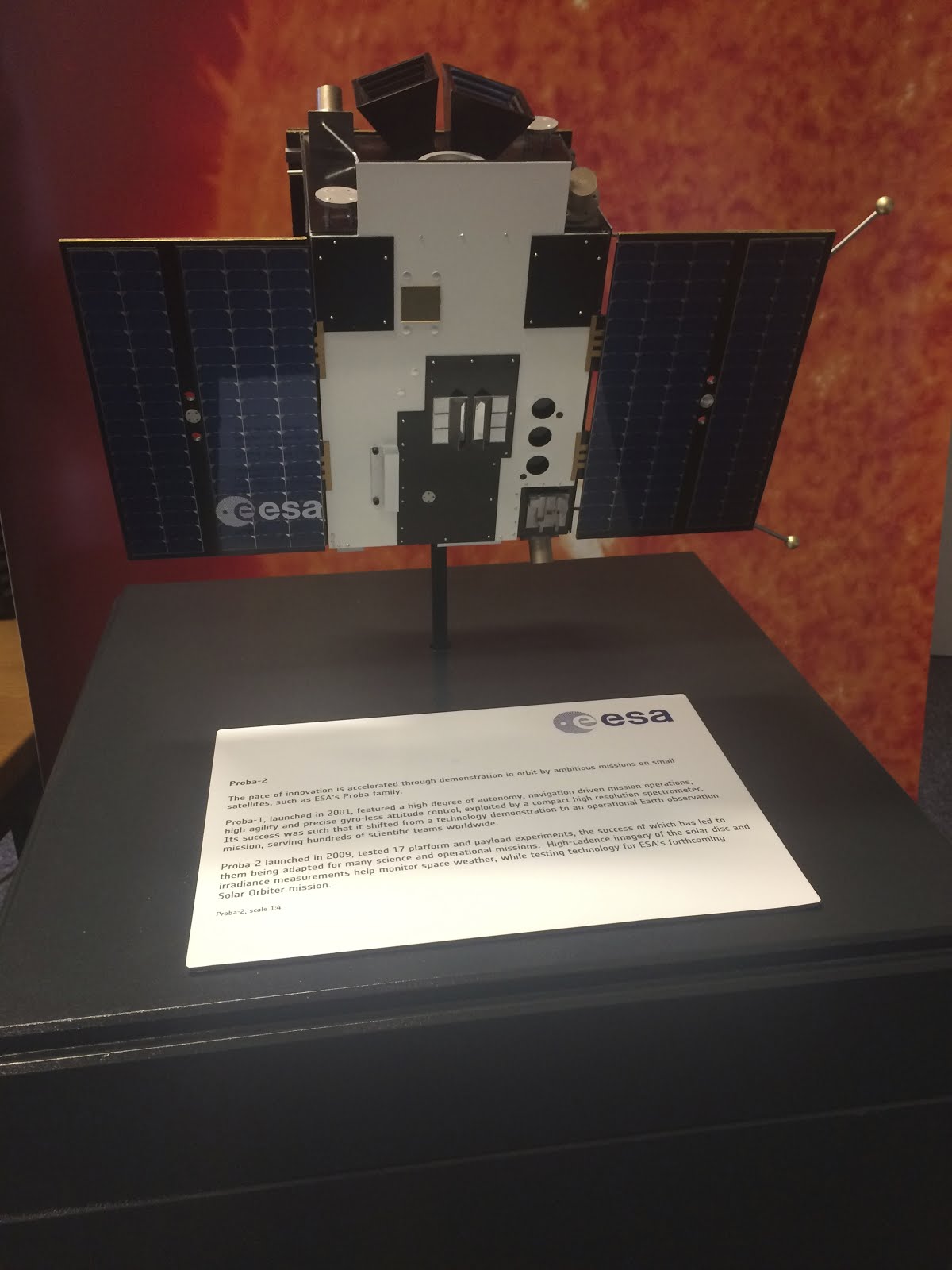
O segundo, PROBA2, foi lançado em 2009 e é utilizado para testar novas tecnologias espaciais. Também transporta os seguintes instrumentos científicos: 2 detetores de partículas e 2 instrumentos complementares para monitorizar a atividade solar. Recentemente capturou imagens extraordinárias de um eclipse solar que ocorreu na Europa. O PROBAV foi lançado em 2013 e a sua atividade consiste em capturar imagens da vegetação com o objetivo de mapear toda a cobertura terrestre e o crescimento da vegetação a cada 2 dias.
 É nesta sala que se faz toda a monitorização dos satélites. Atualmente eles são autónomos, por isso se tudo correr bem não é necessária intervenção humana. De qualquer forma há que registar todos os eventos, as órbitas percorridas e corrigir algum desvio que eventualmente venha a surgir. Os dados recolhidos são enviados diretamente para as respetivas organizações que posteriormente os processam. A esa apenas guarda cópias de segurança dos dados destes satélites, pois não têm como missão fazer tratamento de dados. Dali a 20 minutos, o PROBA2 vai passar na órbita, por isso a equipa está atenta. Se for preciso fazer algum upload tem de ser agora. Mas a nossa visita tem de continuar, por isso deixamos o pessoal trabalhar descansado e seguimos para a próxima paragem.
É nesta sala que se faz toda a monitorização dos satélites. Atualmente eles são autónomos, por isso se tudo correr bem não é necessária intervenção humana. De qualquer forma há que registar todos os eventos, as órbitas percorridas e corrigir algum desvio que eventualmente venha a surgir. Os dados recolhidos são enviados diretamente para as respetivas organizações que posteriormente os processam. A esa apenas guarda cópias de segurança dos dados destes satélites, pois não têm como missão fazer tratamento de dados. Dali a 20 minutos, o PROBA2 vai passar na órbita, por isso a equipa está atenta. Se for preciso fazer algum upload tem de ser agora. Mas a nossa visita tem de continuar, por isso deixamos o pessoal trabalhar descansado e seguimos para a próxima paragem.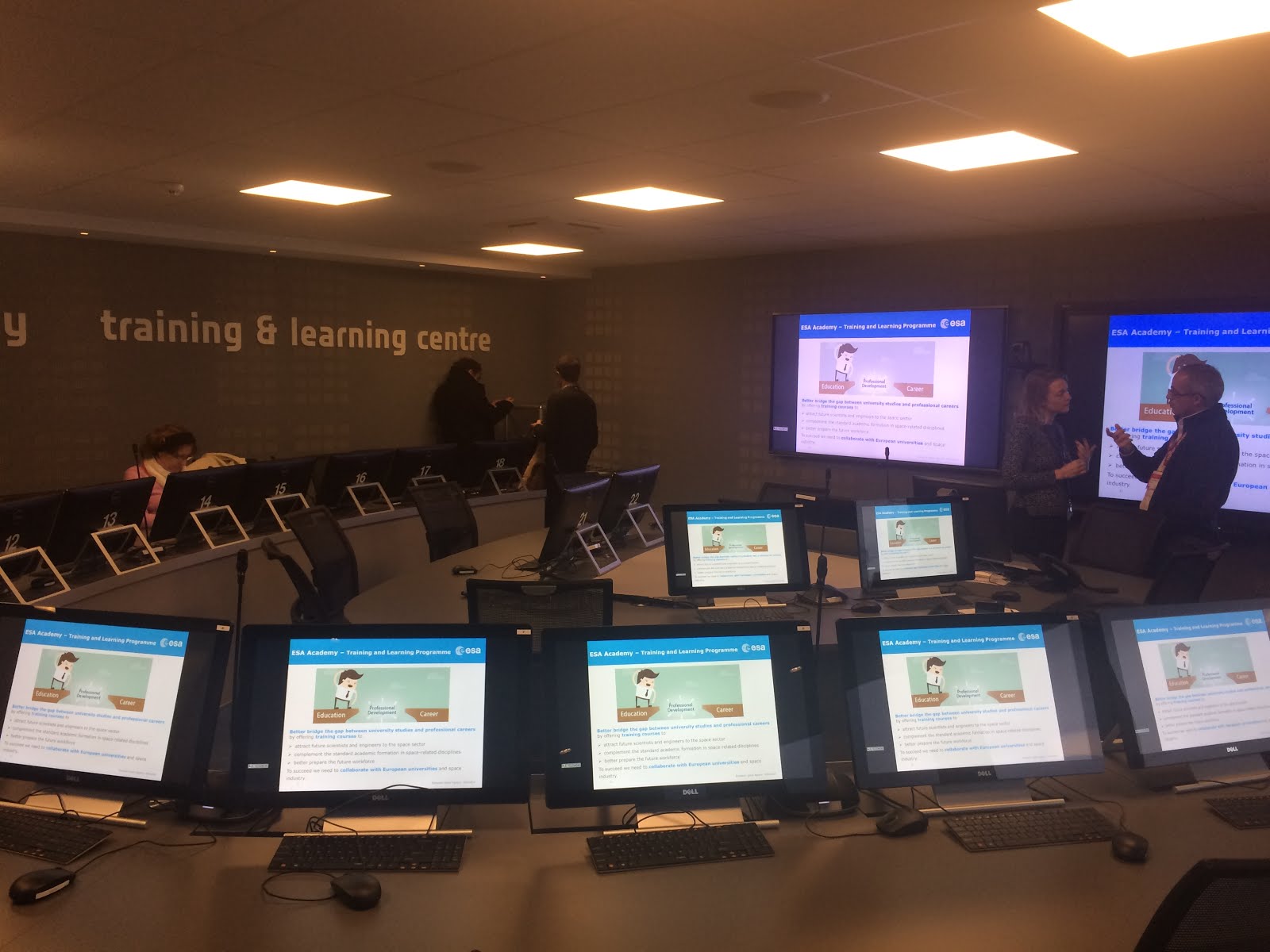 A seguir fomos para o esa academy training & learning center, uma sala de formação de fazer inveja a qualquer um. A sala dispõe de duas mesas em forma de U com cerca de 20 computadores imaculados, dois ercrãs LCD de grande dimensão na parede, do tamanho de um quadro interativo, sendo que um deles é um touch screen, e ainda uma pequena televisão LCD de cerca de 40″ no lado oposto da sala para o formador poder ver a vista de apresentador do power point. E por tanto um luxo para se trabalhar. A coordenadora de educação superior apresenta-nos os vários programas que a esa tem para o ensino universitário enquanto nos seguimos atentamente a apresentação no monitor à nossa frente. A colega já nos tinha feito um breve resumo no dia anterior, mas hoje ficamos a conhecer o programa com mais detalhe.
A seguir fomos para o esa academy training & learning center, uma sala de formação de fazer inveja a qualquer um. A sala dispõe de duas mesas em forma de U com cerca de 20 computadores imaculados, dois ercrãs LCD de grande dimensão na parede, do tamanho de um quadro interativo, sendo que um deles é um touch screen, e ainda uma pequena televisão LCD de cerca de 40″ no lado oposto da sala para o formador poder ver a vista de apresentador do power point. E por tanto um luxo para se trabalhar. A coordenadora de educação superior apresenta-nos os vários programas que a esa tem para o ensino universitário enquanto nos seguimos atentamente a apresentação no monitor à nossa frente. A colega já nos tinha feito um breve resumo no dia anterior, mas hoje ficamos a conhecer o programa com mais detalhe.
Regressamos ao e-robotics lab para continuar o trabalho no nosso rover. Hoje temos de terminar o percurso pela superfície de Marte para depois passarmos à recolha de dados. Fazemos vários testes para levar o rover a percorrer o percurso desde a aterragem até ao local da recolha de dados. O percurso é grande e com muitas variáveis pelo caminho, por isso decidimos testar por secções. Utilizamos um sensor de ultra-sons para podermos contornar a elevação mas num determinado ponto do trajeto, o sensor deixa de ser funcional. Optamos por programar todo o percurso com temporizador, ou seja temos de definir quanto tempo o rover segue na direção pretendida é depois mudar de direção por mais um determinado tempo e por aí em diante. Não é fácil porque a superfície não é plana e qualquer ligeira alteração afeta todo o percurso. Conseguimos programar todas as secções mas para fazer o percurso de forma contínua seriam necessárias mais algumas horas de teste. Isso não é possível também porque Marte está com o trânsito congestionado a esta hora. São muitos rovers a fazer testes!
 A próxima etapa é programar o sensor de temperatura para fazer a recolha de dados para verificar a existência de água em Marte. No topo da superfície existem vários buracos onde temos de colocar insensitive que está acoplado ao nosso rover para fazer a medição. Para conseguirmos alcançar este objetivo, temos primeiro de programar o motor do braço que faz descer e subir o sensor. Posto isto, temos de colocar o sensor a receber os dados. A recolha dura 15 minutos com 10 amostras por segundo. Os dados são apresentados em tempo real no software no computador. Passados o tempo definido temos a nossa amostra. Obtivemos leituras de temperaturas próximas dos 0 graus C e também temperaturas a rondar os 20 graus C. Isto leva-nos a concluir que a água que existe no subsolo tanto pode estar no estado sólido, como no estado líquido. Terminamos aqui a nossa experiência com o rover. Depois do almoço há um novo desafio.
A próxima etapa é programar o sensor de temperatura para fazer a recolha de dados para verificar a existência de água em Marte. No topo da superfície existem vários buracos onde temos de colocar insensitive que está acoplado ao nosso rover para fazer a medição. Para conseguirmos alcançar este objetivo, temos primeiro de programar o motor do braço que faz descer e subir o sensor. Posto isto, temos de colocar o sensor a receber os dados. A recolha dura 15 minutos com 10 amostras por segundo. Os dados são apresentados em tempo real no software no computador. Passados o tempo definido temos a nossa amostra. Obtivemos leituras de temperaturas próximas dos 0 graus C e também temperaturas a rondar os 20 graus C. Isto leva-nos a concluir que a água que existe no subsolo tanto pode estar no estado sólido, como no estado líquido. Terminamos aqui a nossa experiência com o rover. Depois do almoço há um novo desafio.
 Da parte da tarde o objetivo é perceber como é que funciona a comunicação no espaço. Para isso vamos realizar uma experiência de transmissão de lazer da terra para Marte. O lazer é projetado para um espelho num satélite e posteriormente refletido para a superfície do planeta vermelho. Ali temos uma estação que faz o rastreio do céu para captar o sinal luminoso do lazer. Para esta experiência formam-se dois tipos de equipas, os que emitem o sinal e os que captam o sinal. As equipas que emitem o sinal têm um lazer que é acoplado a uma plataforma mecânica para que esta faça a transmissão num código, tipo morse. As equipas que recebem têm de construir uma plataforma para acolplar um sensor de luz que faça o rastreio do céu à procura do laser. Nós escolhemos receber sinal. A plataforma de captura tem de fazer o rastreio tanto na horizontal como na vertical, pois o ângulo do reflexo é desconhecido. Temos de acoplar 2 motores para ambas as direções. Como já adquirimos alguma experiência com os LEGOS, agora a construção é mais fácil. Depois de construída a estrutura é necessário programar o movimento para o rastreio. Neste caso temos de recorrer a vários loops para que os braços se desloquem num ângulo maximo de 180 graus até encontrarem o laser. O rastreio não pode ser feito a 360 graus devido aos cabos que ligam os sensores e os motores ao brick, pois ficariam enrolados e travavam o movimento. Ao final da tarde conseguimos ter a plataforma operacional.
Da parte da tarde o objetivo é perceber como é que funciona a comunicação no espaço. Para isso vamos realizar uma experiência de transmissão de lazer da terra para Marte. O lazer é projetado para um espelho num satélite e posteriormente refletido para a superfície do planeta vermelho. Ali temos uma estação que faz o rastreio do céu para captar o sinal luminoso do lazer. Para esta experiência formam-se dois tipos de equipas, os que emitem o sinal e os que captam o sinal. As equipas que emitem o sinal têm um lazer que é acoplado a uma plataforma mecânica para que esta faça a transmissão num código, tipo morse. As equipas que recebem têm de construir uma plataforma para acolplar um sensor de luz que faça o rastreio do céu à procura do laser. Nós escolhemos receber sinal. A plataforma de captura tem de fazer o rastreio tanto na horizontal como na vertical, pois o ângulo do reflexo é desconhecido. Temos de acoplar 2 motores para ambas as direções. Como já adquirimos alguma experiência com os LEGOS, agora a construção é mais fácil. Depois de construída a estrutura é necessário programar o movimento para o rastreio. Neste caso temos de recorrer a vários loops para que os braços se desloquem num ângulo maximo de 180 graus até encontrarem o laser. O rastreio não pode ser feito a 360 graus devido aos cabos que ligam os sensores e os motores ao brick, pois ficariam enrolados e travavam o movimento. Ao final da tarde conseguimos ter a plataforma operacional.
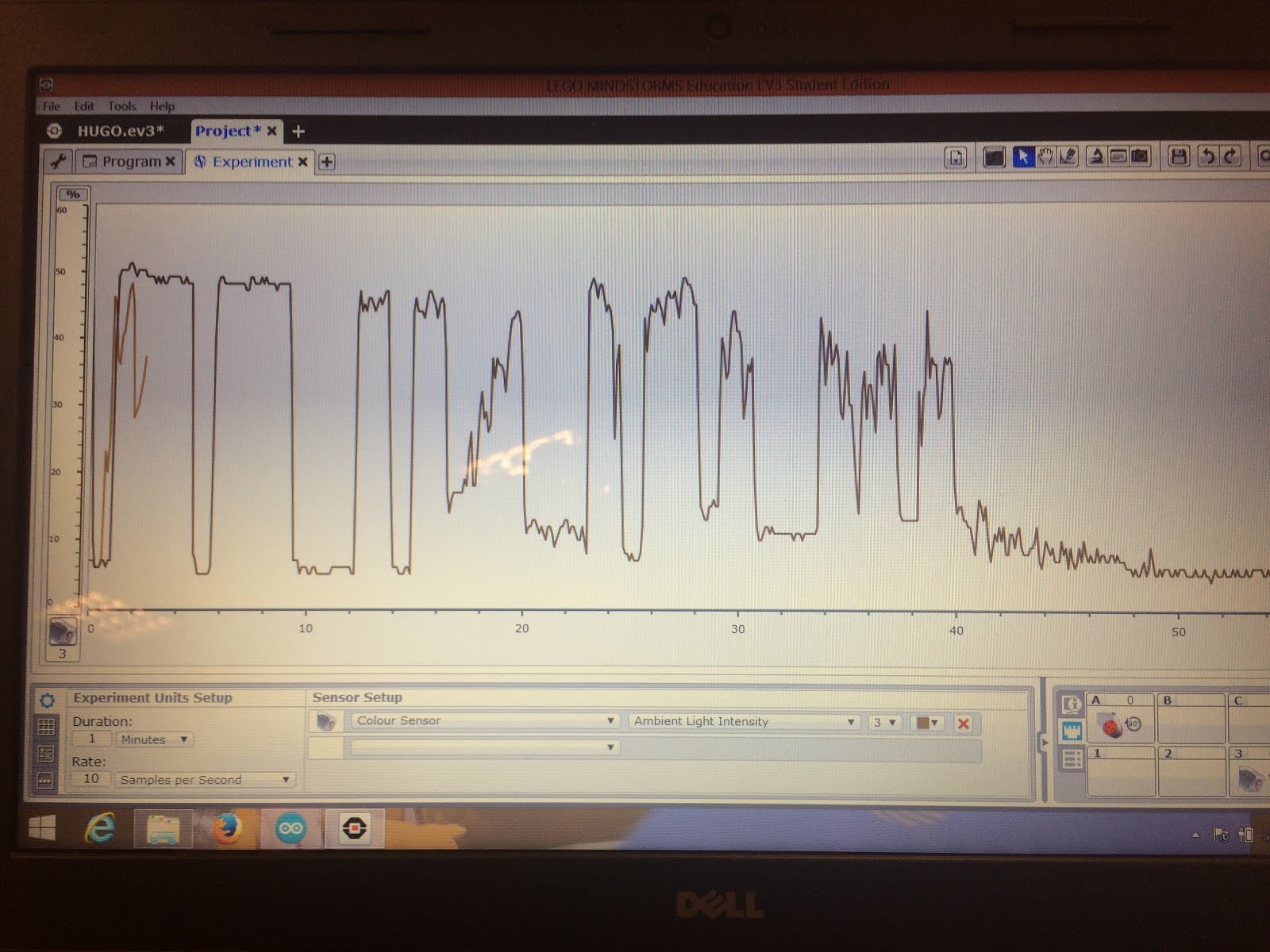
Colocamos a “geringonça” na superfície e esperamos que a outra equipa inicie. Assim que eles emitem o lazer, iniciamos o rastreio. Depois de algumas passagens o sensor detecta o lazer e termina o movimento. A fase seguinte da experiência é captar a mensagem transmitida. Colocamos então o software no modo de experiência e assim que a outra equipa começa a transmissão o nosso sensor envia as leituras em tempo real para o software e podemos ver os valores de intensidade lidos, tanto em formato numérico como em gráfico. Depois de recolhidos os dados fazemos a interpretação com o código fornecido. A mensagem é simples: REDU.
O tempo passou depressa, como quase sempre acontece quando fazemos algo de que gostamos. Foi uma experiência bastante enriquecedora em termos profissionais e também a nível pessoal, pois o espaço é algo que me fascina. Os conhecimentos aqui transmitidos, ainda que de forma muito simples, dão ideias para enriquecer o currículo. É preciso no entanto haver espaço para isso. Por vezes estamos mais preocupados em cumprir prazos e determinados processos burocráticos que relegamos o fascínio e a curiosidade como motivadores da aprendizagem. Mas para introduzir o espaço no contexto educativo é necessário apelar a ambos. Também é pena que os recursos disponíveis em Portugal não nos permitam fazer investimentos nestes materiais. Um kit LEGO® MINDSTORMS® EV3 custa em Portugal 399,99€, sem contar com os extras que se podem juntar. O estado gasta dinheiro em tanta coisa que dificilmente pode suportar este tipo de luxos e os alunos, bem … alguns alunos, preferem comprar um telemóvel do que comprar LEGOS, outros nem uma coisa nem outra. Mas se não for agora, acredito que num futuro não muito distante vamos acabar por “brincar” com robôs nas escolas. E quem não quiser, que se cuide, pois eles vêm ai…
A terminar ainda pensei que me estendessem um convite para fazer parte da primeira experiência de colonização em Marte, mas isso acabou por não acontecer! Por agora vou voltar à terra.
Ligações
- European Space Agency (esa) – dia 1
- European Space Agency (esa) – dia 2

